この冬にも打ち上げが予定されている中国の月探査機「嫦娥4号」のローバーと着陸機のデザインが発表されました。国家国防科技工業局月探査・宇宙事業センターが15日に公表したものです。人民日報の日本語版、英語版が伝えています。

2018年8月15日に発表された、嫦娥4号のローバーのデザイン。出典: 新華社
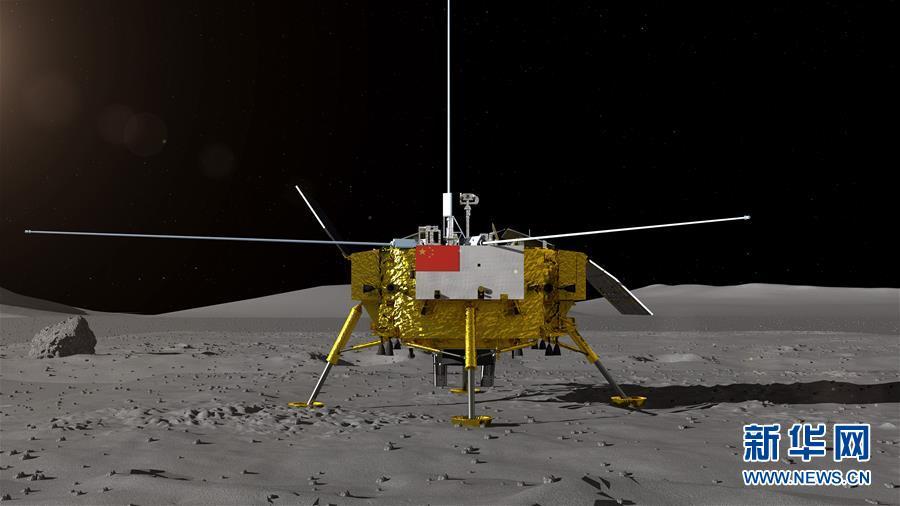
2018年8月15日に発表された、嫦娥4号の着陸機のデザイン。出典: 新華社
https://www.youtube.com/watch?v=FRCG_JzsBtQ
嫦娥4号は中国が開発を行っている月着陸機・ローバーで、今回の記事によると打ち上げが2018年12月になるとのことです(これも重要な情報ではあります)。
嫦娥シリーズは、1・2号が周回機、3・4号が着陸機+ローバー、5・6号がサンプルリターン機となっており、1・2・3号はすでに打ち上げられています。3号は現在も月面で運用中です。
また、嫦娥シリーズの通例として、奇数版(1・3・5号)は運用を達成するための「安全運用」に力点が置かれる一方、偶数番号(2・4・6号)は、一度奇数版で実証が済んでいるため、より挑戦的なミッションに向かう傾向があります。今回も、嫦娥4号は史上初の「月の裏側への着陸」という挑戦を目指すとしています。もちろん成功すれば世界初となります。
同センター主任で、中国の月探査事業の総指揮である劉継忠氏によれば、表側の着陸ではなく、裏側に着陸するということは、直接通信ができない中での着陸を行うという意味で「プロジェクト技術及び宇宙科学の二重の飛躍・革新だ」と述べています。単に着陸するだけではなく、より困難な条件の中での着陸ということを意味しているのでしょう。
なお、ローバーのデザイン(おそらく技術的な面も含めて)は、嫦娥3号のローバー「玉兎」(ぎょくと)をほぼ引き継いだ形になるとのことです。
なお、上で「月の裏側とは直接通信できない」と書きましたが、この点についておさらいしておきましょう。月は地球に常に表側しかみせていません。これは、月が「自転していないから」ではなく、「月の公転と自転が(ほぼ)同じ周期だから」です。月が地球を1回回る間に、月は自分自身が1回回ります。この関係で、月は表側を常に私たちに見せており、裏側を見ることは探査機以外できないのです。
では、嫦娥4号はどうやって通信するのでしょうか? 実はすでに5月、そのための通信衛星が打ち上げられています。衛星は「鵲橋」(じゃっきょう)と名付けられていますが、これは七夕の伝説で、織姫と彦星が出会う際に天の川に橋をかける鳥「カササギ」を意味しています。
鵲橋は月と地球の重力が釣り合う点(ラグランジュ点、L2)にとどまって、地球と月の裏側との通信を中継します。
なお同じ8月15日、嫦娥4号の月面ローバー命名キャンペーンもスタートしました。
この命名キャンペーンは5段階に分かれており、まず最初はエントリーから始まるそうです。これが9月5日までで、その後は命名に対する投票を経て、最終的に10月上旬頃に名前を決定・発表するという手はずになっているようです。
同センターでは、このような命名キャンペーンにより、中国の人たち、とりわけ若い世代の関心を高め、中国の月探査や航空宇宙技術についての関心を体外的に表すと共に、より科学に親しんでもらおという意図もあるようです。
なお、本キャンペーンですが、「国際的」となっているものの、エントリーサイトは中国語のみですので、中国語が理解できていないとちょっと難しそうです。
- 人民網日本語版の記事
http://j.people.com.cn/n3/2018/0816/c95952-9491467.html - 人民網英語版の記事
https://moonstation.jp/ja/history/Chang_e/