■月面着陸を目指すスリム
スリム (SLIM: Smart Lander for Investigating Moon)計画は、イプシロンロケットでの打ち上げが計画されている、月着陸技術実証のための計画です。
当初はイプシロンロケットで打ち上げられる予定でしたが、途中から計画が変更されて、H−IIAロケットで打ち上げられることになりました。また、X線天文観測衛星クリズム(XRISM)と一緒に(相乗りで)打ち上げられることになりました。
スリムは、日本ではじめての月面着陸を目指す計画としてスタートしました。
月や火星のように、ある程度強い重力がある天体を「重力天体」といいます。
初代「はやぶさ」や「はやぶさ2」のように、小さな天体(小惑星)に着陸(タッチダウン)する場合には、小惑星の重力が極めて小さいため、探査機が自在な動きを行いやすいという利点があります。
一方、月の重力は地球の6分の1、火星の重力は3分の1です。月の場合、6分の1の重力とはいえど、それなりの力はありますので、月面に着陸しようとした場合、減速するためにその重力に対抗する力を、何らかの形で探査機(着陸機)自身が生み出す必要があります。そのためにはロケット(エンジン)を逆噴射し、重力の作用を打ち消すことになります。
しかしそのためには、事前に高度や噴射力などを事前に綿密に計算しておくことが必要です。そして、実際の着陸のときに、その計画通りに着陸機が動作しなければなりません。これは決して簡単なことではなく、事実これまでにも、月面着陸に挑みながらうまく行かなかった探査機が多数あります。近年でもイスラエルのべレシートやインドのチャンドラヤーン2が、月面着陸に失敗し、月面に激突してしまいました。
重力天体への着陸は、日本が将来の月探査、火星探査を含めた惑星探査を目指していく場合、絶対に獲得しておかなければならない技術です。スリムではこの重力天体への着陸技術を得ることを目指します。
スリムが月面着陸に成功すれば、日本は旧ソ連・アメリカ・中国・インドについで、世界で5番目に月面着陸に成功した国となります。
■誤差100メートル、ピンポイントでの月面着陸を目指す
スリム計画では、無人の着陸機を高精度(ピンポイント、目標誤差100メートル)で着陸させることを目指します。
これまで、月・惑星探査の着陸機は、地上からの誘導やあらかじめ計画した形での無人着陸を行ってきましたが、着陸地点は予定地点よりも何キロもずれることが普通で、「降りたい場所に降りる」ということはできていませんでした。
スリム計画では、例えば科学的に重要とされる地点などに高精度で(誤差100メートル程度)降りることを目的としており、これまで難しかった「降りたいところに降りる」探査を実現できることになります。そのための技術実証がこのスリムの役割です。
ピンポイントで着陸するために、スリムにはあらかじめ、着陸地点周辺を含めた月の地図が搭載されています。さらに、スリムは着陸の過程で月面をカメラで撮影し、クレーターのように特徴がある地形を自動的に認識し、自分が持っている地図と照合します。これによって自分がいまいる位置を高い精度で認識し、着陸に挑みます。
ピンポイントで着陸することには、これからの月・惑星探査に大きなメリットがあります。
例えば、科学的にどうしても探査したい物質(岩石や鉱物など)があるとしましょう。その場所に降りて探査したいと考えることは自然なことです。しかしこれまでの技術では、狙った場所に降りられないため、降りた場所を(仕方なく)調べるか、ローバーなどを使ってわざわざその場所に赴くなど、困難を強いられてきました。
ピンポイントで着陸ができれば、科学探査にも大きな前進になります。
また、将来有人宇宙船が着陸する際にも、降りるべき場所にピタリと降りることは重要です。そのための技術にも、スリムで培われたテクノロジーが生かされることが期待されます。
■「わざと転ぶ」ユニークな着陸方法
スリムは、着陸方法もユニークです。
一般的な着陸機は、逆噴射をしたまま、まっすぐ(逆噴射用のエンジンを地面に向けたまま)降りていきます。これに対して、スリムは一度前のめりになったあと後ろが着地するという、極めてユニークな着陸を行います。
上空3メートルくらいで探査機が一旦静止、その後前に傾く形でまず前脚が地面に着地、その後後脚が着地します。いわば「だるま落とし」のような原理での着陸です。
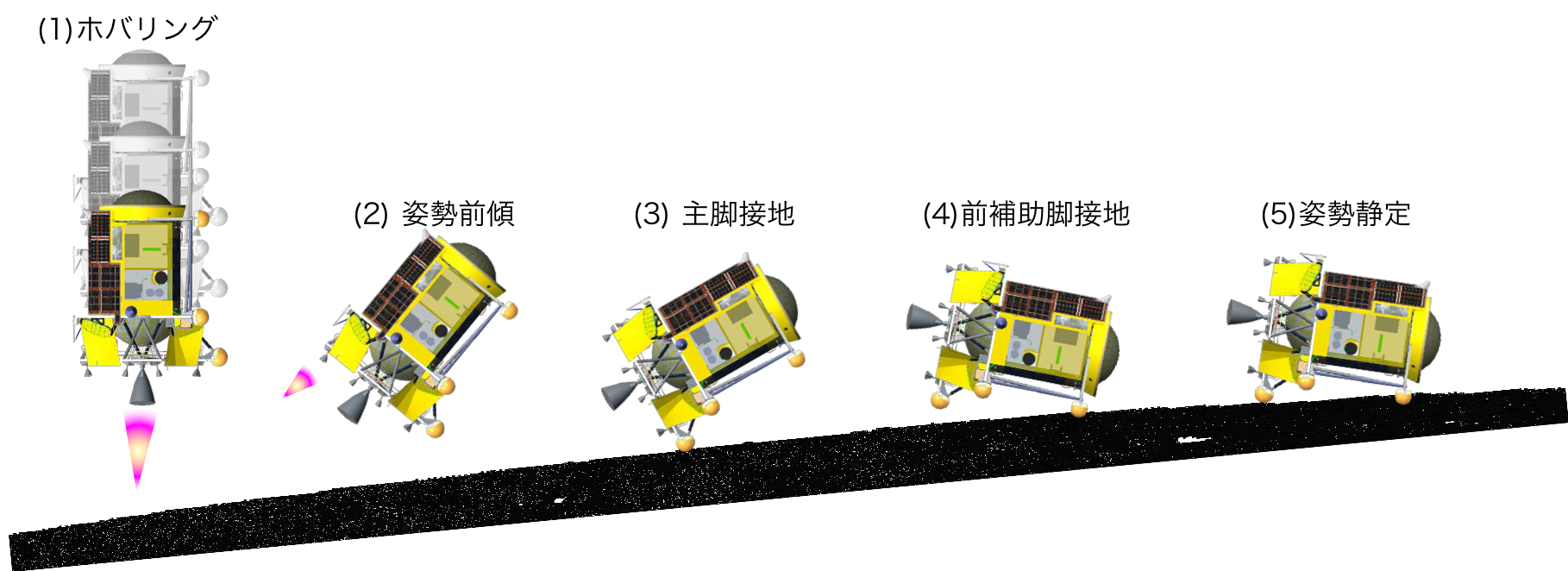
SLIMの着陸方法。着陸後一度前に倒れて前脚が着地、その後後脚が着地するというユニークな方式である。
(Photo: © JAXA)
一般的な着陸方法の場合、地面が斜めになっていると、着陸機ごと傾いてしまい、最悪着陸機が倒れてしまって動作しなくなる事態が発生します。
スリムの着地方法なら、地面が傾いていたとしても安全に着陸できます。「着陸機が傾くのであれば最初から傾けてしまえ」という、まさに逆転の発想、ユニークな発想の結果といえるでしょう。
また、この着陸方法を取るため、スリム全体の設計も、これまでの月着陸機と比べるとかなり変わった形となっています。
■スリムとともに探査を行う2つのロボット
スリムには、探査機から切り離されて探査を行う、超小型ロボットが2つ搭載されています。
1つはJAXAや中央大学などが開発した「小型月面プローブ」(LEV−1)です。
小型月面プローブは、月面を飛び跳ねながら移動します。この「飛び跳ねながら」でピンときた方も多いと思いますが、小惑星探査機「はやぶさ」「はやぶさ2」で、小惑星表面探査のために使われた超小型ロボット「ミネルバ」「ミネルバII」の技術が応用されています。
もう1つは、JAXAやタカラトミーなどが開発した「ソラキュー」(SORA−Q)です。
ソラキューは直径8センチ、重さ250グラムという極めて小さなロボットです。また、形が球系というのもユニークです。
月面に到達すると中心部分が開き、中からカメラが出てきます。
月面を移動する際には、水泳のような「クロール」と「バタフライ」の2つのモードがあります。月面の砂(レゴリス)だらけの環境でも動けるように工夫されています。
変形しながら月面を動くロボットは、変形ロボットを得意とするおもちゃ会社が開発したという点でもユニークといえるでしょう。
■H-IIAロケットに搭載され、2024年1月20日に月着陸予定
スリムは2016年から開発が始まり、当初は2018年度にも打ち上げられる予定で進められました。当初の打ち上げは、小型のイプシロンロケットが予定されていました。
また、開発を迅速に行うため、また小型ロケットに搭載するため、小型の着陸機として設計・開発されました。
しかしその後、「より確実に計画を実行するため」として打ち上げが2019年度に延期、さらに、X線天文衛星クリズムとの相乗り打ち上げ、及び打ち上げロケットをH−IIAに変更するために打ち上げ年度が2021年度に延期されました。さらに、クリズム開発の難航により打ち上げが2022年度に延期されました。
最終的に2022年度末に打ち上げられる予定でしたが、この時期がH3ロケットの初打ち上げに重なることから、H3の打ち上げを確実に行うために打ち上げを2023年度に延期することになり、さらにH3打ち上げが失敗し、H-IIAロケットにも見直しが必要になったことからさらに打ち上げが延びることになりました。
このように、スリムは度重なる打ち上げ延期を経て、ようやく9月7日、打ち上げられました。
打ち上げ後は月へ直行するのではなく、一度月のそばを通り過ぎる「月スイングバイ」を実施し(10月4日に実施)、3〜4ヶ月をかけて月へと向かいます。12月25日、月周回軌道への投入に成功しました。
月に到着後は一旦周回軌道に入って1〜2ヶ月にわたって月を周回し、その後月面着陸に挑みます。2024年1月15日、高度600キロの月周回円軌道に投入され、いよいよ着陸に向けた体制に入りました。
月面着陸は2024年1月20日未明(20日の午前0時20分。19日の夜半すぎ)が予定されています。