
|
|
|||||||
| > 月・惑星へ > 火星・赤い星へ > 火星探査 > マーズ・リコネサンス・オービター > トピックス | |||||||
 |
マーズ・リコネサンス・オービター トピックス
2006年12月14日 18:30更新
2004年8月以降のトピックスを掲載しています。
スピリットとバイキング着陸機の写真を撮った! (2006年12月4日発表)
マーズ・リコネサンス・オービターからの最新の写真には、火星に着陸したNASAの探査機が写っていました。1つは、今も火星表面を探査中の、「マーズ・エクスプロレーション・ローバ」の1台、「スピリット」。2つは、1976年に火星に着陸した、2台のバイキング着陸機です。 すでにこのマーズ・リコネサンス・オービターは、その高精度のカメラにより、「スピリット」の仲間であるローバ「オポチュニティ」の写真を2ヶ月前にカメラに収めています。 これらの写真は、火星への使節の写真を撮ったというそれだけのことではなく、そのローバや着陸機が置かれている周辺の環境を調べる上でも、科学者に重要な情報を提供したことになります。これにより、今後の計画を進めていく上で貴重な情報がもたらされたことになります。 この新しい画像は、11月から始まった、マーズ・リコネサンス・オービターの初期科学フェーズの中で得られた写真の中でも比較的新しいものです。 アリゾナ大学所属で、マーズ・リコネサンス・オービター搭載のカメラ(HiRISE)の主任科学研究者であるアルフレッド・マキューエン(Alfred McEwen)博士はこう述べています。「スピリットやバイキング着陸機のカメラにより、これらの場所が地表面にあることはすでにわれわれが十分知っていることである。新しい軌道上からの写真により得られる科学的な知識を加えることによって、火星の他の場所で、地表面を直接見たことがない場所についての知識を得ることに役立つかもしれない。」 「コロンビア・ヒルズ」と名づけられた丘の中にいる「スピリット」の写真は、早速、ローバの毎日の行動を決める科学者や技術者に渡されました。ちょうど2ヶ月前、同じローバである「オポチュニティ」の写真が同じようにローバの行動に役立ったのと同じ理屈です。「オポチュニティ」の2枚目の写真は、現在1枚目の写真と共に、立体視ができるように加工されています。 バイキング着陸機の周辺を撮影した写真により、着陸機の背面板(back shell)と呼ばれる部品が、着陸機から約260メートル離れたところに落ちていることがわかりました。また、耐熱板がその4倍ほど離れたところに落ちていることもわかりました。このバイキング着陸機は、火星の地表の写真をはじめて地球に送ってきた探査機として知られ、1976年7月20日に着陸してから、約6年間にわたって写真を送り続けました。 バイキング着陸機の写真撮影で、位置計算などを行ったJPLのティム・パーカー博士がいちばん驚いたのは、「30年経っても、(着陸の際に使用した)パラシュートがはっきりと写っていた」ということです。 ローバ「スピリット」「オポチュニティ」やバイキング着陸機1号機とは異なり、バイキング着陸機のうち2号機は、これまでのマーズ・グローバル・サーベイヤーによる写真でも見つけられませんでした。これまでの画像で、そうではないかと思われていたものは、このたび新しくマーズ・リコネサンス・オービターによって撮影された写真により、本体から約400メートル離れたところにあった背面板であることが明らかになりました。 パーカー博士はまた、バイキング着陸点付近にあり、かつてあだ名が付けられた岩についても特定を進めています。こういった岩には、例えば「アンキロサウルス」(2号機の着陸点付近にある1メートルほどの岩)や「ビッグ・ジョー」(1号機の着陸点付近)などがあります。 NASAでは、バイキング着陸機2号機付近の写真の解析を最優先で行っています。これは、来年(2007年)夏に打ち上げ予定の着陸機、フェニックスの着陸点選定に役立てるためです。フェニックスが着陸する予定地は、バイキング着陸機2号機の着陸点よりもかなり北の方ではありますが、これまでにみてきた火星の表面のうち、いちばん近いものであると考えられています。 フェニックスの着陸点ワーキンググループの議長で、ワシントン大学セントルイス校のレイ・アービッドソン(Ray Arvidson)博士は、「バイキング着陸機2号の着陸点は、週回帰からの撮像と着陸機からの撮像によって、私たちが周回機からの写真しか持っていない場所について、地表の粗さや石の密度などを見積もる上でのよい材料を提供してくれる。」と語っています。
JPLのプレスリリース (英語)
この間のトピックスは準備中です
はじめてのテストデータが届く (2006年3月24日発表)
 マーズ・リコネサンス・オービター(MRO)がテスト撮影した火星の画像が、地球に届きました。(左はMROがテスト撮影した火星の高精度写真。Photo by NASA/JPL-Caltech/University of Arizona)
マーズ・リコネサンス・オービター(MRO)がテスト撮影した火星の画像が、地球に届きました。(左はMROがテスト撮影した火星の高精度写真。Photo by NASA/JPL-Caltech/University of Arizona)MROに搭載されている3つのカメラは、3月23日の午後8時36分(アメリカ太平洋時間。日本時間では24日午後1時36分)に火星に向けられ、40分間にわたってテストデータを取得しました。 「これらの火星の高解像度画像はわくわくするようなものだ。そして、朝の時間帯だったということを考えると、非常にユニークなものである。MROの最終軌道は、マーズ・グローバル・サーベイヤや2001マーズ・オデッセイと同様、火星の午後の時間帯を周回するものになる。」と、火星の高解像度カメラの主任科学者で、アリゾナ大学のアルフレッド・マキューエン (Alfred McEwen)氏は話しています。 「これらの画像は、カメラがちゃんとセットされているかどうかを確かめる最初の機会であると同時に、カメラの性能を視野全体にわたって確かめる機会でもある。」と、NASA本部のミッション計画科学者のスティーブ・サンダース (Steve Saunders)氏は述べています。「ここで得られた情報は、この秋に始まるメーンミッションの期間に用いられることになるだろう。」 画像自体の目的は、カメラ自身の較正や、精密な修正など、カラー画像や高精度のステレオ視での地表同定に必要な画像処理の技術の確認などです。 希望通りの地表速度と光の角度を得るために、科学者たちは火星上空約2500キロメートルを飛行しているときに写真を撮影しました。実際には、探査機はこの8分の1ほどの高さを飛行しながら探査を行う予定ですので、もっと高精度な写真が撮れることになります。それでも、テスト写真の精度は1ピクセルあたり約2.5メートルもの解像度が得られ、これまでの火星探査でもっとも高い解像度の写真に並ぶデータとなっています。 何ヶ所かについてカラーデータを得るために、今後1〜2週間にわたってさらにこの写真の解析が行われる予定です。 現在、MROは火星を回る長楕円軌道を飛行しており、近火点(火星にもっとも近い点)は約420キロ、遠火点は43000キロです。この軌道を、およそ35時間で1周しています。 JPLとロッキード・マーチン宇宙システムのチームでは、火星大気によって探査機を減速させる「エアロブレーキング」の準備を進めています。大気圏内を550回通過することによって、大気との摩擦によって速度を下げ、最終的には高度300キロの円軌道へと探査機を導くものです。 既に3ギガバイト(CD-ROM約5枚分)のデータが受信されており、これらはアリゾナ大学月惑星研究所やマーリン宇宙科学システムで処理が行われました。
JPLのプレスリリース (英語)
MRO、火星軌道へ投入成功 (2006年3月10日発表)
 非常に厳密なタイミングでのエンジン噴射を行った後、マーズ・リコネサンス・オービターは、火星を回る軌道に、無事投入されました。
非常に厳密なタイミングでのエンジン噴射を行った後、マーズ・リコネサンス・オービターは、火星を回る軌道に、無事投入されました。アメリカ太平洋時間の3月10日午後2時16分、MROが火星の後ろ側から姿を表した(信号が受信された)ことが分かると、カリフォルニア州パサデナのジェット推進研究所、そしてコロラド州デンバーにあるロッキードマーチン社の管制室は、一斉に拍手と歓声に包まれました。 喜びの声を聞いてみましょう。「非常に重要なポイントを通過したことになる。しかし、シャンパンを空ける前に、われわれにはまだやらなければいけないことがたくさんある。観測軌道に入ったら、探査機は火星の大気、表面、地下をこれまで例のない詳しさで観測することになる。」(NASAの科学探査局の副局長、コリーン・ハートマン (Colleen Hartman)氏)。  MROは8月12日(現地時間)の打ち上げ後、火星まで約5億キロの旅を行いました。火星に近づいてくると、火星重力に捉えられるために、主スラスタを噴射する必要がありました。このスラスタの噴射が始まったときには、探査機は地球との交信ができていました。しかし、噴射終了後約30分間は、火星の裏側を飛行するため、電波が届かないという不安な状況にありました。
MROは8月12日(現地時間)の打ち上げ後、火星まで約5億キロの旅を行いました。火星に近づいてくると、火星重力に捉えられるために、主スラスタを噴射する必要がありました。このスラスタの噴射が始まったときには、探査機は地球との交信ができていました。しかし、噴射終了後約30分間は、火星の裏側を飛行するため、電波が届かないという不安な状況にありました。 MROの計画主任であるジム・グラフ氏は、今回の周回軌道投入成功についてこうコメントしています。「私たちの探査機は、ついに周回機になった。嬉しい気持ちでいっぱいではあるが、その時間はとても短いものだろう。なにしろ、科学観測段階に入るまでに、軌道を正しい大きさと形に持っていくという、6ヶ月間にわたる非常に困難な仕事が待ち構えているからだ。」
MROの計画主任であるジム・グラフ氏は、今回の周回軌道投入成功についてこうコメントしています。「私たちの探査機は、ついに周回機になった。嬉しい気持ちでいっぱいではあるが、その時間はとても短いものだろう。なにしろ、科学観測段階に入るまでに、軌道を正しい大きさと形に持っていくという、6ヶ月間にわたる非常に困難な仕事が待ち構えているからだ。」MROは、これから約半年をかけて、「エアロブレーキング」と呼ばれる行程によって、慎重に軌道の変更を行っていきます。これは、火星の上層大気との摩擦によって探査機の速度を下げ、それによって軌道を変更するというものです。現在飛行している軌道は非常に長いだ円形の軌道ですが、これを半年間かけて、1周2時間の円軌道にまで直すことになります。11月に予定されている科学観測段階に入る段階では、軌道はほぼ円軌道で、高さは約320キロメートルから255キロメートルになります。この高さは、これまでの火星探査機の中でもっとも低いものです。もしエアロブレーキングを使わず、直接このような円軌道に投入しようとすると、探査機は打ち上げ時に、およそ7割も多い燃料を積まなければならなかったでしょう。 「火星で行われている一連の探査は、それぞれ私たちの火星の水の存在と歴史についての知識を広げてくれた。MROの探査の目的の1つは、いつ水が火星の表面にあり、いまどこにあるかを調べることである。水は生命に不可欠なものであり、火星が生命発生に適していたかどうかを将来にわたって集中的に調べるのに役立つだろう。」(この探査に加わっている科学者であるリチャード・ズーレック博士)
JPLのプレスリリース (英語)
いよいよ、火星軌道投入へ (2006年3月8日発表)
マーズ・リコネサンス・オービターは、火星到着の最終段階にあります。 火星到着に向けた一連のシーケンスの中でいちばん重要なポイントは、3月10日(日本時間3月11日)に行われる、27分間にわたる主スタスタの噴射です。この噴射により速度を20パーセント落とし、火星の周りを秒速5000メートルという速度で回る軌道に入ることになります。この軌道投入の状況は、カリフォルニア州パサデナのジェット推進研究所(JPL)、及びロッキードマーチン宇宙システム(コロラド州デンバー)で監視されることになります。 「私たちは何年もかけて、この重要なときのために準備をしてきた。」と語るのは、JPLの計画責任者、ジム・グラフ氏です。「状況をみた限りでは、成功の確率はかなり高いといえるだろう。しかし、火星は決して自信過剰になれる場所ではない。これまでNASAが送った最近の4つの周回機のうち2つは最終段階で生き延びることができなかったのだから。」 マーズ・リコネサンス・オービターは、いま火星にある5つのロボット探査機の成功に、さらにもう一歩を加えることになります。火星の上にはローバ(「スピリット」と「オポチュニティ」)、周回機はマーズ・グローバル・サーベイヤと2001マーズ・オデッセイ、そしてヨーロッパのマーズ・エクスプレスが周回しています。 マーズ・エクスプロレーション・ローバは、低軌道から火星の表面、大気、そして地下の様子を非常に詳しく観測します。さらに、将来の着陸計画に最適な場所の選定や、探査機のデータのリレーなども行うことになっています。マーズ・リコネサンス・オービターは、これまでの探査機の10倍にも及ぶ高速のデータ通信ができるようになっています。 しかし、いずれにしてもまず必要なのは、火星周回軌道に入ることです。そのためのスタスタ噴射は、アメリカ太平洋標準時で3月10日午後1時24分(日本時間で3月11日6時24分)に開始されます。技術者の計算によれば、この噴射によって、探査機が火星の重力に捉まって、非常に長いだ円形の火星周回軌道に入ることになります。ここから半年間、500回以上の周回を重ね、火星上層大気との摩擦による減速(エアロブレーキング)を行った上で、最終的にはほぼ円軌道の観測軌道に入ることになります。 JPLのリチャード・ズーレック博士は、「初期科学観測期間は、今年の11月以降になるだろう。しかし、エアロブレーキングによって火星上層大気を通過することを利用して、火星大気の変化の様子などの観測を行うことになるだろう。」と述べています。
JPLのプレスリリース (英語)
探査機、火星へ近づく (2006年2月27日16:20)
マーズ・リコネサンス・オービター(MRO)がいよいよ、重大な局面を迎えています。探査機はこれから減速して、火星の重力に捉まり、その周回軌道に入ろうとしています。到着は3月10日が予定されています。 「探査機が正しい位置についてくれれば、火星についての私たちの知識を大幅に広げてくれることになるだろう。そして、将来的なロボット探査への道を開くと共に、人間を火星に送るという計画にも貢献するだろう。」と語るのは、NASAの火星プログラム部長であるダグ・マッキスチョン氏です。 MROは、火星の詳細を調べるために、これまでの火星探査機全てが送ってきたデータよりも大量のデータを地球に送信してくることになっています。探査機が探査をはじめる前に、火星の大気を利用して軌道を調整する「エアロブレーキング」という操作が必要になります。火星大気の摩擦を利用して探査機の速度を徐々に下げ、それにともなって軌道の高度を下げていくという操作です。 探査機が最初に入る軌道は、超楕円の、1周35時間の軌道です。これを次第に遠火点を下げていき、最終的にはほぼ円の、1周2時間の軌道にします。エアロブレーキングは火星大気の上層を利用し、何百回にもわたって少しずつ、計算された通りに高度を下げていきます。探査機は大気の抵抗を受ける程度には低いところを飛びますが、しかし、探査機が摩擦熱で焼けてしまうほど深いところは飛ばないようにしなければなりません。 「エアロブレーキングは、外でやる綱渡りみたいなものだ。火星大気は急速に膨張するので、大気をしっかり監視して、探査機が正常で安全仲人を飛んでいることを確かめなければならない。」(MROの探査責任者、ジム・グラフ氏) 探査機が3月10日に火星に近づきますと、地上からはエンジン噴射の指令がなされます。これによって探査機は低軌道に投入されます。この噴射が終わりますと、探査機は交信ができない魔の30分間を迎えることになります。 探査機には、地下の地層から上層大気までを調べる6つの測定器が搭載されています。これまで火星に送られた中でもっとも強力な望遠カメラは、小さい机サイズの岩まで解析することができます。鉱物の分布を測定する機械は、水に関係した領域を、野球場の内野くらいの精度で調べ上げることができます。レーダは、地下に埋もれている氷や水の発見に役立ちます。天候カメラは惑星の天気を毎日監視します。そして赤外サウンダーは大気の温度や水蒸気の移動などを調べます。 「特に興味があるのは水、それも、水が氷なのか液体なのか水蒸気なのかだ。」と語るのは、MROの科学者であるリチャード・ズーレック(Richard Zurek)氏です。「水がいま存在しているところ、そして過去に存在していたところを調べることで、火星がかつて生命を育めたのかどうか、という問いに将来にわたって答が得られることになる。」 探査機は、これまでに比べて10倍も早い割合でデータを送ることができます。そのために探査機には直径3メートルのパラボラアンテナが搭載されています。それを支えるのが、0.1平方メートルの太陽電池、そしてそこから発生した電力を利用する送信機です。科学者たちは、このデータを利用して、火星の大気の変遷や、地表の様子の移り変わりについてより詳しい理解を得ることになるでしょう。 また、MROは単に火星を調べるだけでなく、将来の火星探査において、表面を探査する機器からのデータの中継役も果たします。2008年に到着し、北極の極冠近くの地表を調査するフェニックス計画や、2009年に計画されているマーズ・サイエンス・ラボラトリなどのデータを中継し、地球に送信する計画です。
NASAのプレスリリース (英語)
高精度カメラが撮影した月 (2005年10月7日11:00)
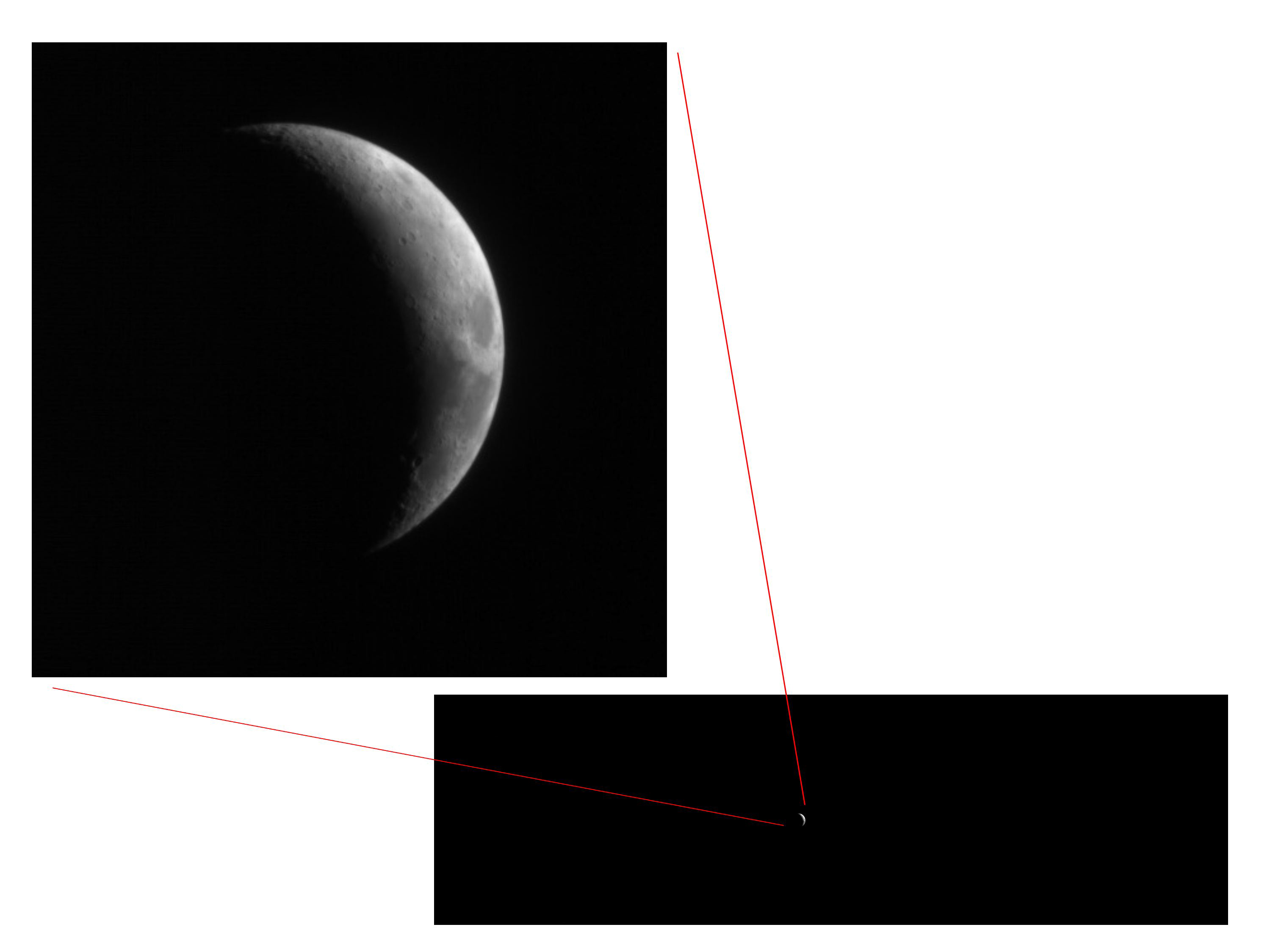 左の写真は、MROに搭載されている高解像度撮像装置により撮影された月です。撮影は9月8日に行われました。月までの距離はおよそ1000万キロあります。この撮影は、カメラが正常に動くかどうかの試験、校正を実施するためのものでしたが、カメラの威力を示すものとなりました。
左の写真は、MROに搭載されている高解像度撮像装置により撮影された月です。撮影は9月8日に行われました。月までの距離はおよそ1000万キロあります。この撮影は、カメラが正常に動くかどうかの試験、校正を実施するためのものでしたが、カメラの威力を示すものとなりました。右下側の小さく写っている(クリックして高解像度の画像でご覧ください)月を拡大しますと、左上のように、三日月がくっきりと写っています。実際の画像は20000×6000ピクセルという巨大なものですが、その中で月の画像は直径340ピクセルほど。三日月の幅は60ピクセルで、解像度としては1ピクセルあたり10キロにも達します。
JPLの記事へ (英語)
カメラはいずれも正常に動作 (2005年9月14日発表)
MROに搭載されているカメラの試験が行われ、月を対象にした撮像が9月8日に成功しました。 「カメラがうまく動作したことに非常に満足している。火星を撮る日が待ち切れない。」と述べているのは、MROの高解像度撮像の主任科学者である、アリゾナ大学のアフルレッド・マックバン (Alfred McEwen)博士です。 テストでは、広範囲カメラと航法用カメラ、又地球へデータを送るための高利得アンテナについても試験が行われました。「テストは成功だ。75ギガビット(約9ギガバイト)のデータを24時間以下で送ることができた。惑星間通信での新記録だ。」と誇るのは、MROの計画主任であるジム・グラフ氏です。 MROは月から1000万キロメートル離れたところで撮像を行いました。この距離では普通、月は点にしかみえません。しかし、高解像度カメラで撮影された月は、直径が340ピクセルあり、三日月状態であっても60ピクセルの幅を持っていました。このカメラ、探査機のものすごさが分かろうかというものです。
JPLのプレスリリース (英語)
軌道修正に成功 (2005年9月9日18:00)
マーズ・リコネサンス・オービターは、来年10月の火星到着を目指して順調に飛行中です。8月27日、搭載しているスラスタ(小型ロケット)6つを噴射し、予定通り軌道を変更することに成功しました。 初期的な観測の結果では、軌道修正により、探査機は予定通り秒速7.8メートルだけ速度を変更し、太陽に対する速度は秒速32856メートルとなりました。 さて、6つあるメインエンジンは、火星に到着するまで使われません。次の噴射は25分間にわたり、MROを減速させ、火星の回りを周る軌道へと入るときになります。火星に到着するまでにはあと3回ほど軌道修正を行いますが、これはより小さなエンジンにより行われます。 順調に行けば、MROは2006年3月10日、火星に到着する予定です。
JPLのプレスリリース (英語)
はじめての仕事 (2005年8月17日発表)
MROは12日に打ち上げに成功してからはじめての仕事となる、火星カラーイメージャの校正作業を行いました。 MROの副計画主任のダン・ジョンストン氏は、「探査機は既に打ち上げモードからクルーズモードに移行しており、探査機の状態は極めてよい。」と語っています。 MROは飛行中4回の軌道変更を予定していますが、そのうち最初で、しかももっとも大きな軌道変更は、8月30日に予定されています。 8月15日に行われたカメラ試験では、探査機は15度回転して、地球および月の方向を向きました。その後、また飛行中の定位置に戻っています。データは正常に記録され、地球へと送られてきました。サンディエゴにあるマーリン宇宙科学システムにおいて画像処理と解析が行われています。 このカメラは、MROに搭載されているカメラのうちもっとも広角なものです。毎日、火星を300キロ上空から撮影するのがその役割です。今回は、約100万キロ以上離れた三日月城の地球と月を撮影しました。点程度にしか両天体とも写りませんでしたが、これでも、カメラの性能を確認するのには十分です。9月の中旬には、高解像度カメラによって地球と月の撮像が予定されています。
JPLのプレスリリース (英語)
打ち上げ成功 (2005年8月12日発表)
 MROは、アメリカ東部時間8月12日午前7時43分(日本時間12日午後8時53分)、ケープ・カナベラル空軍基地から、アトラスV型ロケットにより打ち上げに成功しました。 MROは、アメリカ東部時間8月12日午前7時43分(日本時間12日午後8時53分)、ケープ・カナベラル空軍基地から、アトラスV型ロケットにより打ち上げに成功しました。19階建のビルほどの高さもあるアトラスVロケットは、ケープカナベルラル空軍基地の第41発射場から轟音と共に大空へと向かいました。約200トンの燃料を5分で消費し、その後ロケットは無事切り離されました。今回は、惑星間探査機の打ち上げにはじめてアトラスV型ロケットが使われたということも特筆すべきことです。 「私たちには、火星に向かって正常に飛行している探査機と、それを可能にした大勢の人々がいる。」と、MROの計画主任であるジェームス・グラフ氏は語っています。 打ち上げから61分後、MROは電波による通信に成功しました。なお、この最初の通信を受信したのは、日本のJAXAの内之浦宇宙空間観測所のアンテナでした。 この内之浦、及びオーストラリア・ゴールドストーンのアンテナにより、衛星の状態が送られてきました。ロケット切り離しから14分後、MROは太陽電池の展開を完了し、一人前の衛星として機能をしはじめました。 今日現在、火星は地球から7200万キロ離れていますが、MROはこの4倍以上の距離を飛行して火星に到達します。火星到着は2006年3月10日の予定です。衛星はその間もただ飛んでいるだけではなくて、機器検査や軌道修正など、数多くの予定をこなすために忙しい日々が続きます。 到着後、MROは減速し、火星の重力に捉えられて、火星を回るだ円形の軌道に入ります。その後、探査機は半年かけて、ゆっくりと火星へと降りていく「エアロブレーキング」という段階に入ります。これは、火星の大気との摩擦を利用して探査機を減速させ、軌道を火星に近いものにすると共に、円形に近い軌道へと変えていくという作業です。こうしてか聖に近づいて、本格的な観測を開始するのは、2006年11月を予定しています。
JPLのプレスリリース (英語)
打ち上げはさらに1日延期 (2005年8月11日発表)
マーズ・リコネサンス・オービターの打ち上げはさらに1日延期されることになりました。新しい打ち上げ時間帯は、8月12日の午前7時43分〜午前9時43分(アメリカ東部標準時間)です。 今回の延期は、ロケットの水素推進剤注入システムの計器の値が異常を示したためです。ロケットはタンクを一度空にすることになりました。ロケットそのものは打ち上げ射点に下り、MROの状態も正常です。 明日の打ち上げについて、天気予報ではまばらなにわか雨があるとなっています。打ち上げが天候上可能な確率は80%となっています。
打ち上げは8月11日 (2005年8月10日発表)
マーズ・リコネサンス・オービターは打ち上げに向けて順調に時を刻んでいます。打ち上げスケジュールは、8月11日の午前7時50分〜午前9時35分(アメリカ東部標準時)となっています。 前の記事にもあったように、本来10日に予定されていた打ち上げは、ロケットの姿勢制御系ジャイロの以上によって1日延期され、11日となりました。本日、ロケット技術者の会合により、ジャイロの検査の結果、打ち上げに支障がないことが確認され、11日の打ち上げにGOが出されました。
火星への大きな一歩、打ち上げは間近 (2005年8月9日)
8月11日の打ち上げに向けて、マーズ・リコネサンス・オービター(MRO)は静かにそのときを待っています。打ち上げ時刻は東部大西洋時間で7:54〜9:39となっています。打ち上げが現期されれば、この打ち上げ時刻はその都度変更されていきます。地球から火星へ探査機を打ち上げるためには、約26ヶ月おき(2年22ヶ月)にやってくる短いチャンスを狙わなければなりません。これは、火星が、地球と太陽を結んだ線を越えて、向こう側にいるときになります。 NASAの火星探査計画部長のダグ・マッキスチョン (Doug McCuistion)氏は、「探査機とロケットを準備したチームはすばらしい仕事を時間通りにこなした。これまでのどの周回機よりも精密に火星を調べるための、進歩した測定器を積んだ探査機が、はじめての惑星探査来打ち上げを行うアトラスVロケットの上に載っている。非常に強力な組み合わせだ」と述べています。 MROは来年3月に火星に到着しますが、そのあと、約半年かけて、火星の大気をつけて減速する「エアロブレーキング」という行程を踏みます。探査機は火星の大気に寄る摩擦を利用して、軌道や高度を少しずつ修正して行きます。そして、2006年11月から、本格的な探査を開始する予定です。 JPLの計画主任のジェームス・グラフ (James Graf)氏は、「MROは、これまでの探査機が集めた全てのデータを合わせたよりも数倍も多いデータを地上に送ってくる。」と述べ、探査機に大きな期待を寄せています。科学者は、これらのデータを火星の水の存在や進化の歴史を解き明かすために使うことを考えています。火星の水がどのような挙動を示してきたのかを調べることによって、火星にかつて生命がいたのかどうか、という疑問にも迫ることができるでしょう。 一方、探査機による観測は、将来の火星探査に置いて、着陸やローバ探査などを行う際に、最適な場所を調べるための基礎資料を提供します。さらに、探査機自体が、地上の探査機との中継船の役割を果たします。 MROは、これまでの探査機に比べて10倍も多いデータ送信ができる能力を持っています。火星の表面や地下、大気に関する詳細な情報が得られるほか、着陸船やローバからのデータも送られてくることになるでしょう。NASAが2007年に計画しているフェニックス・ランダーのデータも、このMROを利用して中継され、地球に届くことになります。また、「マーズ・サイエンス・ラボラトリ」と名付けられた、より進歩したローバを2009年に打ち上げる計画もあります。 火星探査の地平を切り拓くMRO。その打ち上げまで間もなくです。
JPLのプレスリリース (英語)
打ち上げ、1日延期 (2005年8月9日発表)
マーズ・リコネサンス・オービターの打ち上げが1日延期されることになりました。新しい打ち上げ時間帯は、8月11日の午前7時50分〜午前9時35分(アメリカ東部標準時)です。 打ち上げ延期の理由は、冗長レートジャイロユニット(RRGU)の不具合によるものです。このシステムは、打ち上げようロケットのアトラスVに搭載されている他の2つのRRGUと同様、飛行制御システムの一部をなすものです。 技術チームでは、今回の不具合の原因を究明し、アトラスVロケットに搭載されている他のRRGUにも影響がないかどうかを調べることにしています。
衛星の打ち上げ時刻 (2005年7月22日発表)
マーズ・リコネサンス・オービターの打ち上げ時刻が決定しました。
NASAのプレスリリース (英語)
火星の謎に鋭く迫るマーズ・リコネサンス・オービター
(2005年7月21日) 火星について、これまでにない飛躍的に大量の情報をもたらすと期待されているマーズ・リコネサンス・オービター。現在、アメリカ・フロリダ州のケネディ宇宙センターで、打ち上げに向けての最終準備が進められています。 探査機が調べるのは、火星の大気の最上層から地下にまで及びます。研究者は、探査木場も垂らすデータを、火星の水の分布や存在の歴史の解明につなげようとしています。また、探査機は、将来の火星探査に向けて着陸点の選定につながるデータを提供したり、データのリレーを行う衛星になるなど、様々な役割を担います。 NASAの火星探査計画担当部長であるダグラス・マッキストン (Douglas McCuiston)氏は、「マーズ・リコネサンス・オービターは我々の野心的な火星探査計画の次の一歩だ。私たちはこの探査機を数年間にわたって火星の眼として活用して、将来の着陸に最適な場所を探したいと思っている。」と述べています。 探査機は6つの機器を積み、火星の大気、表面、地下を探査します。このうち、表面を撮影するカメラのうち1つは、これまで他の惑星に送られたカメラの中でも最大の直径を持つ望遠レンズを装備しています。このカメラにより、岩や地層などの観測が、机の大きさくらいの精度で行えると期待されています。もう1つのカメラはさらに10倍くらい広い領域を高精度で撮影し、さらにもう1つのカメラは火星の天気について全球にわたって調べる予定です。 また、探査機に搭載されたスペクトロメータは、水に関連した鉱物を野球場の内野くらいの広さの精度で調べることができます。地下探査用のレーダはイタリア宇宙機関(ASI)から提供されたもので、地下にある地層や岩、氷、そしてもしあれば水を探査することができるでしょう。さらに2つの調査は、火星上層大気、及び火星の重力を調べることになります。 「私たちは、『火星の水を追う』という戦略をこのマーズ・リコネサンス・オービターでも踏襲する。」と、NASA本部の火星探査主任科学者は述べています。「マーズ・グローバル・サーベイヤ、マーズ・オデッセイ、マーズ・エクスプロレーション・ローバによる最近の探査で、ガリ(小規模な谷)、地表近くの永久凍土、そして過去に表面に水があったことがわかってきた。火星に関する知識はこの数年で新しくなった。水について何が起こったのかについてもっと知ることは、過去、あるいは現在、火星に生命がいるかどうかということにつながってくる。」 JPLのリチャード・ズーレック (Richard Zurek)氏は、「高解像度は、この計画の大きな売りだ。高い解像度で火星表面をみる度に、火星はこういうだろう。『ここには思いがけないものがあるよ。まだあなたは私のことを理解していないのね。』間違いなく私たちは、データをみて驚くことになるだろう。」 探査機の火星到着は2006年3月の予定です。火星大気を利用した減速(エアロブレーキング)により次第に軌道高度を下げ、2006年11月から、約25ヶ月(ほぼ火星の1年)にわたる観測期間に入ります。軌道高度は高さ約300キロで、通常の火星探査機より2割程度低いところを飛びます。これにより、いままでに見たことのない高精度の探査結果が得られることになるでしょう。また、大量のデータを送るためのアンテナも、これまでの衛星では最大級です。旧来の衛星に比べ、10倍のスピードでデータを送ることができます。 8月10日の打ち上げに向け、探査機への期待は徐々に高まりつつあります。
JPLのプレスリリース (英語)
衛星が最終検査へ (2005年5月2日)
※記事更新は6月21日に行っています。 マーズ・リコネサンス・オービター(MRO)の打ち上げが近づいてきて、いよいよ衛星が打ち上げ場所のフロリダ州に運ばれてきました。  MROは、組立作業を行っていたコロラド州からフロリダ州まで、貨物飛行機で移送されてきました。
MROは、組立作業を行っていたコロラド州からフロリダ州まで、貨物飛行機で移送されてきました。MROの任務は2010年まで続く息の長いものです。火星の表面の組成や構造を、これまでの探査機よりもさらに細かい精度で調べることが計画されています。また、将来の有人火星探査計画に備え、基地として適切な場所を調べるほか、地上の探査機の電波をリレーして地球に送り届ける役割も備えています。 さて、MROは、4月30日にフロリダ州のケネディ宇宙センターのスペースシャトル着陸用滑走路に、C-17輸送機に搭載されて降り立ちました。探査機本体はそのまま、危険搭載貨物修理施設(Payload Hazardous Servicing Facility)へと輸送されました。探査機はコロラド州デンバーにあるロッキードマーチン社の施設で組み立てられていました。 MROは、機器組立と電気テストが何回か行われ、打ち上げに支障がないことが確認されます。5月には、NASAの新宇宙通信網(DSN: Deep Space Network)との通信が可能であることを確認するテストが実施されます。6月のテストは、探査機に搭載されたハイゲインアンテナの展開が正常に行われるかどうかを確かめるものです。また、大型太陽電池パネルの展開もテストされます。 7月になると、衛星には火星軌道投入や軌道制御の際に使われる燃料(ヒドラジン)の注入が行われます。7月26日には、MROは打ち上げロケットであるアトラスVに据えつけられ、発射場所であるケープカナベラル空軍基地へと向かいます。既に、アトラスVはアントノフ輸送機に載せられて3月31日に到着し、宇宙飛行管制センターへ運ばれています。エンジン部分も5月に到着し、第41射点にある垂直組立棟でロケットが組み上げられます。 7月には打ち上げを控えたリハーサルも行われます。アトラスVロケットも垂直組立棟から出され、射点まで動きます。ロケットには燃料である液体酸素、液体水素が充填され、打ち上げのカウントダウンのシミュレーションが行われます。その後、アトラスVはもとの垂直組立棟に戻ることになります。 MROが垂直組立棟に運ばれるのは7月29日の予定です。その後、ロケットの先頭に据えつけられ、打ち上げ準備は最終段階を迎えます。機能試験が8月1日に行われ、問題がなければ、8月10日7時53分(アメリカ東部時間。日本時間では8月10日午後8時53分)に、火星へと旅立つことになります。
JPLのプレスリリース (英語)
衛星とロケットの準備が順調に進む (2005年1月10日12:40)
いよいよ打ち上げの年に入ってきました。衛星の準備は順調に進んでいます。 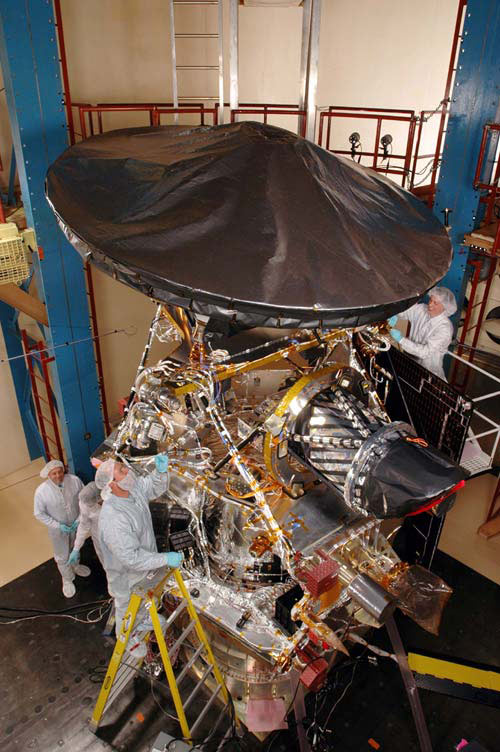 衛星は、現在アメリカ・コロラド州デンバーにある、ロッキードマーチン宇宙システムの施設で、環境試験などが行われています。ここでは、打ち上げられるロケットであるアトラスV(ファイブ)の準備も行われています。衛星の準備は、8月10日の打ち上げに向けて予定通り進められています。
衛星は、現在アメリカ・コロラド州デンバーにある、ロッキードマーチン宇宙システムの施設で、環境試験などが行われています。ここでは、打ち上げられるロケットであるアトラスV(ファイブ)の準備も行われています。衛星の準備は、8月10日の打ち上げに向けて予定通り進められています。「JPL、ロッキードマーチン、そして各種機器の製造者は、1つのチームとして一生懸命、そして効率的に働いている」と述べているのは、このマーズ・リコネサンス・オービター(MRO)のプロジェクト総責任者であるJPLのジム・グラフ氏です。 「スケジュールは依然として厳しいが、この探査機、チームそして機器が行うであろう任務にどきどきしている。この宇宙船のバス機器(探査機の機械類などを取りつける基板部分)や科学機器は、これまでのどの惑星探査機よりも能力の高いものだ。このミッションの成果は、私たちの火星に関する知識を外記ていに帰ることになるだろう。」(おなじくジム・グラフ氏) MROには6つの科学機器が搭載される予定ですが、そのうち1つを除いて、5つが既に探査機に取り付けられています。1つだけ残っている撮像スペクトロメータは、科学チームが電気部品を交換できるように一旦取り外されています。 ロッキードマーチン宇宙システムのMRO総責任者のケビン・マクニール(Kevin McNeill)氏は、「私たちは順調なペースでテスト段階に進んでいて、この春には衛星をフロリダ(打ち上げ場所)に運ぶことができるだろう。」と述べています。 MROはこれまでの探査機と比べてもすばらしい探査機だ。その理由の1つは、『オープン・ストラクチャ』という構造を取り入れたことで、技術者や科学チームのメンバーが、探査機のテストや組み立ての最中でも、探査機の中や周辺で作業ができるからだ。これまでの探査機に比べて、簡単に、アクセスしやすくなっている。いろんな意味で、『オープン・ストラクチャ』は探査機の組み立てやテストを簡単にできるようにしている。」 この探査機を準備している建物からいくつかビルをはさんだ建物では、この探査機を打ち上げるロケットであるアトラスVの準備が進められています。このロケットで、8月10日(アメリカ東部時間)に探査機を打ち上げることになっています。アトラスロケットは現在、最終組み立て及びテスト段階を迎えており、3月に打ち上げのために、ケープカナベラル空軍基地に運ばれる予定です。 JPLのMRO計画の科学者であるリッチ・ズーレック(Rich Zurek)博士は、現在1年を経て活躍しているマーズ・エクスプロレーション・ローバの成果を振り返りつつ、MROについての期待を次のように述べています。「マーズ・エクスプロレーション・ローバの重要な発見は、火星の表面にかつてかなりの量の水が長期間存在したということだ。従って、火星探査については『水を追う』という戦略が適切だろう。しかし、ローバは火星のごく狭い領域だけしか探査できない。MROの最終目標は、かつて水が長期にわたって存在した場所を、火星の表面でたくさん見つけ出すことだ。そうすることによって、将来の探査での発見が期待でき、一方探査のリスクが少ない場所を選び出すことができるだろう。」
JPLのプレスリリース (英語)
科学機器も順調に準備中 (2004年8月11日16:40)
昨日お伝えした通り、本体も順調に準備ができていますが、マーズ・リコネサンス・オービター (MRO)に搭載される予定の科学機器も、順調に組み立てが進んでいます。 MROには6つの科学機器が搭載される予定ですが、いずれもそれぞれの組み立て場所で、最終的な検査やテストが行われています。MROには他にも、将来の火星探査ミッションで役立つと思われる技術実証機器が2つ、そして、リモート通信用のパッケージ「エレクトラ」が搭載されています。 検査されている科学機器の中にはカメラもあります。このカメラ、これまで火星に送られたカメラの中では最大のものです。それもそのはず、最大解像度1メートルで火星の地表を捉えようというものですから。 このカメラは現在、アリゾナ大学が主発注者となって、コロラド州にあるボールエアロスペース社で組み立てが進んでいます。その他、MRO搭載の3つのカメラのうち2つは、カリフォルニア州サンディエゴにあるマーリン・スペース・システムで組み立てられています。このカメラは、広い刈り幅と高解像度を同時に実現するもので、もう1つのカメラは気候や大気(特にオゾンの濃度)を測定するためのものです。 一方、海を越えたイタリアでは、イタリア宇宙機関でレーダーサウンダー(電波を火星の地表に照射して、地下に染み透った電波を通して地下の構造を知る装置)の製作が進んでいます。これにより、地下にある氷などを詳しく知ることができます。 また、MROでは、将来の惑星間の大容量通信に備え、いまよりもより高い周波数での通信の実験を行う予定です。これにより、火星などからより多くのデータを送れるようになります。 NASAの火星関係の主席科学者であるジム・ガービン (Jim Garvin)博士は次のように述べています。「私たちは、火星に関する科学的な戦略を、次世代の探査機によって得られるデータを中心に組み立てる予定であり、MROのチームが進めている感銘すべき進歩に誇りを持っている。MROは2009年に打ち上げ予定のマーズ・サイエンス・ラボラトリー探査機をどのような場所に送るべきか、重要な情報を送ってくるに違いないし、その情報は将来の有人火星探査計画にも役立つだろう。」
JPLのプレスリリース (英語)
打ち上げまでちょうど1年 (2004年8月10日17:50)
来年の打ち上げまで、ちょうど1年となりました。現在、ミッション・チームでは、探査機に搭載する多目的ペイロードの総合テストを行っています。 「この探査機は、我々の火星における探査機と探査装置の能力を飛躍的に伸ばすものだ。」と、この計画の総責任者であるジェームス・グラフ (James Graf)氏は述べています。打ち上げ時の総重量2180キログラムという単先は、これまでに火星へ送られたどの探査機よりも大きく、地球までの回線も、住宅用の電話回線の3倍のスピード。おそらくものすごく大量のデータを送ってくることになるでしょう。もちろん、それらは科学的に解析され、火星に関する膨大な知識を我々に与えてくれることになります。 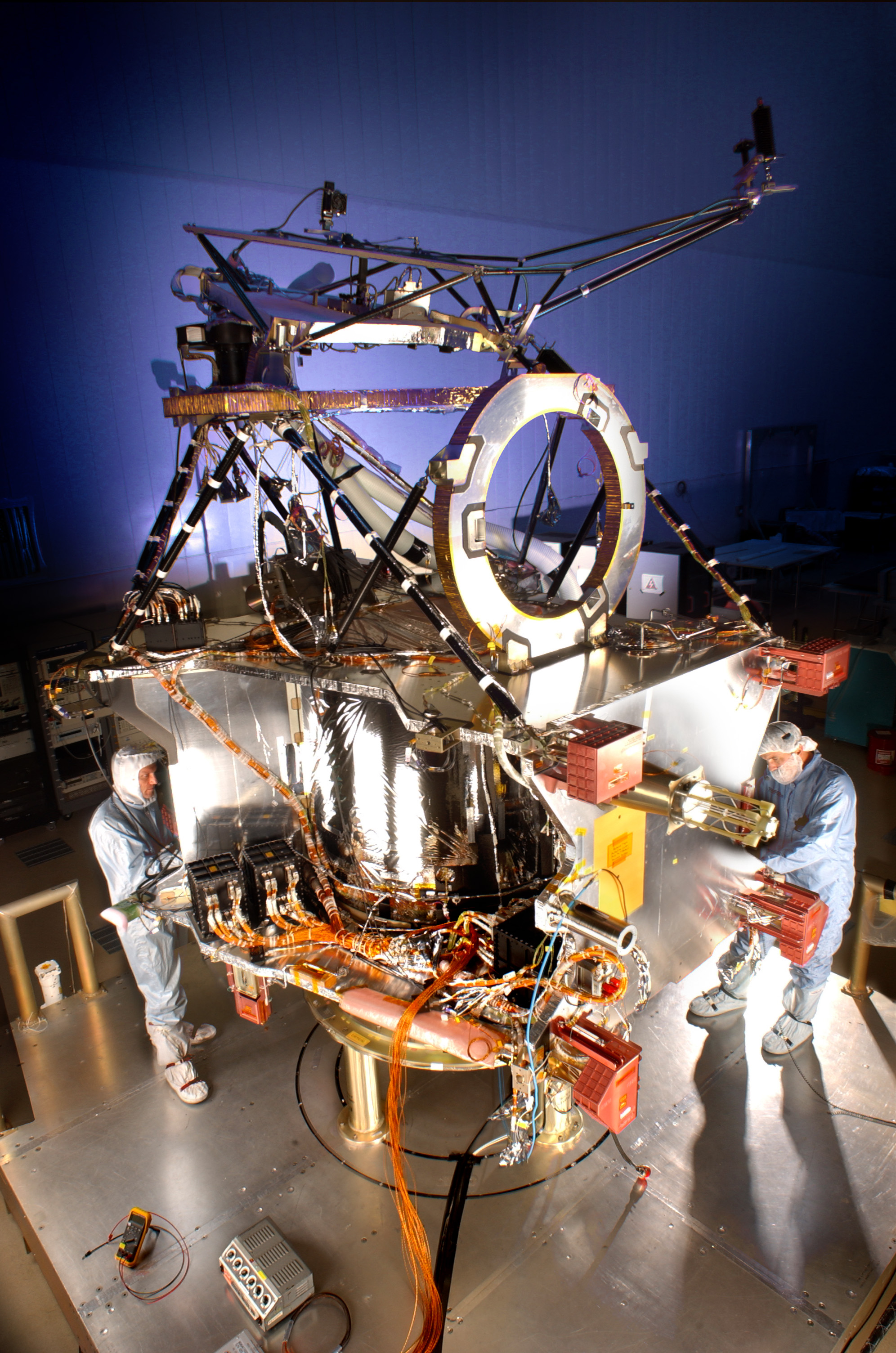 コロラド州デンバーにあるロッキードマーチン宇宙システムの工場では、探査機の最終組み立てが行われています。フライト用ソフトウェアは96%まで完成しました。同じ施設では、打ち上げに使われるロケット、アトラスVの組み上げも行われています。ロッキードマーチンからは約175人、JPLからは110人が、この計画に参加しています。
コロラド州デンバーにあるロッキードマーチン宇宙システムの工場では、探査機の最終組み立てが行われています。フライト用ソフトウェアは96%まで完成しました。同じ施設では、打ち上げに使われるロケット、アトラスVの組み上げも行われています。ロッキードマーチンからは約175人、JPLからは110人が、この計画に参加しています。ロッキードマーチンの計画責任者であるケビン・マクニール (Kevin MacNeill)氏は、「我々のチームは、探査機のサブシステム(電源や通信など個別のシステム)の組立とテストの大部分を終了した。これから数ヶ月かけて、科学機器の組み立てとテストを行う。それが終わったら、来年のはじめあたりに環境テストを行い、できれば春あたりにはケープ・カナベラル空軍基地(打ち上げ場所)に運び、ロケットとの組み上げを行いたい。我々は全員、火星に探査機を送り届け、データを持ち帰ることに非常に興奮している。」と述べています。 なお、写真は、ロッキードマーチンの工場で組み立てが進む、マーズ・リコネサンス・オービター探査機です。
JPLのプレスリリース (英語)
|
|
|
|